 無人叉車有哪些關鍵技術?核心零部件有哪些?買前必看
無人叉車有哪些關鍵技術?核心零部件有哪些?買前必看

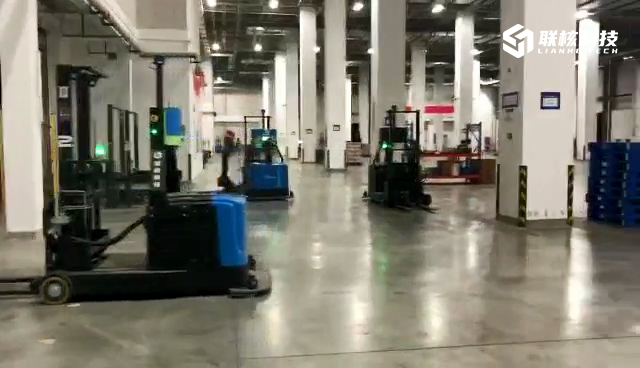
無人叉車的工作原理主要依賴于先進的導航、感知、路徑規劃和電動驅動等技術,確保車輛能夠自主地在工業環境中完成物流和運輸任務。以下是無人叉車工作原理的詳細解釋:
1.導航系統
無人叉車通常配備先進的導航系統,用于準確地確定其位置和方向。
導航系統可以采用多種技術,包括激光傳感器、視覺識別、激光雷達、磁導航或慣性導航等。
其中,反射板導航原理是在無人叉車的行駛路徑上間隔一定的距離布置反射板,通過激光掃描儀發射激光束并采集反射回來的激光束來確定叉車的位置和行駛方向。
基于SLAM(同步定位與建圖)的環境自然導航原理則允許無人叉車在陌生環境中通過內部和外部傳感器對自身進行定位,并構建環境地圖。
2.路徑規劃
無人叉車通過與中央控制系統通信,獲取任務和目標位置。
基于這些信息,它使用路徑規劃算法確定最優路徑,以避免障礙物、最小化行駛距離,并在需要時遵循特定的規則。
3.感知系統
無人叉車通常配備各種傳感器,如激光雷達、超聲波傳感器、攝像頭等,以偵測周圍環境、障礙物、其他車輛和人員。
這些傳感器提供實時數據,幫助車輛做出安全的決策。
4.電動驅動系統
無人叉車通常使用電池驅動,具備電動馬達或電動車輪。
電動系統使得叉車能夠實現靈活的移動,并能夠在需要時快速響應任務。
5.通信系統
無人叉車通過與中央控制系統的通信,接收任務指令、更新路徑信息,并實時報告自身狀態。
這種實時的雙向通信確保車輛能夠適應環境變化,同時提高了整個系統的可控性。

6.安全系統
為了確保無人叉車的安全運行,這些車輛通常裝備有緊急制動系統、避障系統和安全傳感器。
這有助于防止與障礙物、其他車輛或人員發生碰撞。
7.機器視覺技術
無人駕駛叉車的載體通常安裝有多個攝像頭和激光雷達,通過實時捕捉周圍環境信息,采用深度學習算法對環境進行建模和識別。進而實現對障礙物、貨物位置、空間位置等信息的準確獲取和分析。
通過上述技術的結合,無人叉車能夠在工業自動化環境中高效、安全地完成物流和運輸任務,提高生產效率和安全性。
審核編輯 黃宇
-
傳感器
+關注
關注
2565文章
52862瀏覽量
766281 -
激光束
+關注
關注
0文章
77瀏覽量
10430
發布評論請先 登錄
微電機關鍵零部件制造誤差對其質量的影響權重分析
汽車零部件的MES系統解決方案:實現智能制造轉型的核心利器

如何給汽車零部件進行疲勞耐久測試?

汽車零部件開發項目管理
汽車零部件檢測功能性測試技術

汽車零部件需要做哪些試驗?

利用COLLABORATION 3Dfindit中的關鍵數據優化零部件管理
智能零部件管理助力中電思儀的標準化管理
從汽車零部件檢測看變焦、變倍鏡頭應用差異

AIM有限公司有效控制零部件的野蠻增長并優化企業流程
激光錫焊在汽車零部件制造中的應用

國產工業核心零部件崛起背后,華丞電子的智慧與突破

激光淬火技術在淬火發動機零部件的工藝應用
3D掃描儀為民航零部件制造精準護航!





 工商網監
工商網監
評論