完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫為您提供最新技術(shù)文章,最實用的電子技術(shù)文章,是您了解電子技術(shù)動態(tài)的最佳平臺。
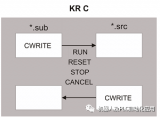
CAST_TO使得使用單個CWRITE語句處理多達4 KB的數(shù)據(jù)成為可能。CAST_TO將單個變量分組為一個緩沖區(qū)。...
“CWRITE”語句能夠使文字寫入打開的通道,或者命令被寫入命令通道。 應用實例: 數(shù)據(jù) ( 寫語句) 在KRC1 和裝置間( PC, 智能傳感器...). 轉(zhuǎn)換。...
機器人自動化帶來的是非標設(shè)計工作量的大量減少,只需要合理設(shè)計手爪、dress、一些相對標準的周邊設(shè)備,就能完成復雜的自動化功能。這使得企業(yè)能以同樣的人力成本完成更多的生產(chǎn)線的設(shè)計安裝和調(diào)試,實現(xiàn)企業(yè)的規(guī)模擴張。...

極海智能掃地機器人應用方案,主控模塊采用了APM32F407系列高性能MCU,該系列芯片擁有高主頻、高性能、高集成、外設(shè)資源豐富等特點,結(jié)合GW8811系列低功耗藍牙4.2芯片,可實現(xiàn)豐富、精準且高效的家居定位清掃功能。...

工業(yè)機器人的分類可以根據(jù)不同的標準進行,這里列舉了幾種常見的機器人分類方法。正確認識工業(yè)機器人的基本類型和特點,對于正確選型、規(guī)劃生產(chǎn)線以及實現(xiàn)自動化生產(chǎn)都非常重要。...
機器人節(jié)約能源選項之C4----SMARPAT的鎖屏。 隨便選一個可以帶鍵盤的 點擊文字 ,出現(xiàn)鍵盤。點擊WIN 選擇setting--》control Pannel...

TheKPS 600 的作用: ?主要的電源供應 ?開始回路的電源供應 ?剎車控制(主要6個軸的以及額外2個軸的) ?通過Interbus來控制DSE-IBS的界面 ?24 V 電壓分配 ?電池電路...

安全邏輯電路 ESC (Electronic Safety Circuit ,電子安全回路)是一種雙信道、支持中央處理器的安全系統(tǒng)。它可對所有連接上的、與安全有關(guān)的元件進行持久監(jiān)控。安全回路發(fā)生故障或中斷時,驅(qū)動裝置供電電源將關(guān)閉,由此可使機器人系統(tǒng)停止。...
定位精度和運動所需的時間是這種控制方式的兩個主要技術(shù)指標。這種控制方式具有實現(xiàn)容易、定位精度要求不高的特點,因此,常被應用在上下料、搬運、點焊和在電路板上安插元件等只要求目標點處保持末端執(zhí)行器位姿準確的作業(yè)中。...
柔性機器人和剛性機器人都是機器人技術(shù)的一種,但二者的設(shè)計和應用有很大的區(qū)別。 1. 結(jié)構(gòu)設(shè)計: 就結(jié)構(gòu)而言,剛性機器人一般采用關(guān)節(jié)連桿的設(shè)計結(jié)構(gòu),機器臂由多個關(guān)節(jié)構(gòu)成,可進行多自由度的運動。而柔性機器人則采用多節(jié)段式設(shè)計,中間通過特殊的聯(lián)軸器連接。柔性機器人結(jié)構(gòu)柔軟,柔韌性強,可彎曲和伸縮...
有研究表明,機器人是人工智能和智能制造的交匯點。工業(yè)機器人是自動化核心裝備。...
如果”小藍”離開安全區(qū)后,應先發(fā)給”小黃”的安全信號,釋放互鎖信號.”小黃”后進入安全區(qū)后,關(guān)閉互鎖信號,等待小藍的安全信號....

KLI 始終與 VxWorks 側(cè)進行通訊。 與 Windows 只可通過選定的端口才能連接,具體端口已在 KSS 8.x 出廠時預設(shè)完畢。這種連接可通過存檔功能、文件共享功能、遠程桌面協(xié)議或WorkVisual 來建立。...

首先選擇備份點擊OK,把你的硬盤裝回庫卡柜,然后把U盤插入庫卡柜開機,開機什么也不動等待10分鐘左右,等待自動關(guān)機(等待的過程中什么也不要動切記等待關(guān)機)。...

未來戰(zhàn)場上錯綜復雜的電磁頻譜環(huán)境,人機混合的海量作戰(zhàn)單元,虛實交疊的多域作戰(zhàn)行動,決定著未來戰(zhàn)場上的通信不可能都是點對點,可能是多點對多點的,是有人、無人和環(huán)境同時在線的一個超級指揮控制網(wǎng),這也許就是“數(shù)據(jù)鏈”的智能化發(fā)展方向[1]。...
機器人模塊中集成了一個擁有6自由度的高效機器人核心,在路徑規(guī)劃中,通過PLC-Open Part 4確保了最高自由度,同時僅通過調(diào)整參數(shù)就能非常方便地完成取放運動,無需機器人方面的專業(yè)知識。...
視覺堆垛程序通過相機視野內(nèi)目標比例的變化來估算目標的高度并引導機器人的運動補償目標的偏移,不但包括X軸,Y軸和X-Y平面旋轉(zhuǎn)度R,也同時包括Z軸。使用iRVision 2.5D允許機器人只借助一個普通2D相機來拾取碼放堆集的目標。...
主體 - 即機座和執(zhí)行機構(gòu),包括臂部、腕部和手部,有的機器人還有行走機構(gòu)。大多數(shù)工業(yè)機器人有3-6個運動自由度,其中腕部通常有1-3個運動自由度;...
機器人研究的核心就是:導航定位、路徑規(guī)劃、避障、多傳感器融合。定位技術(shù)有幾種,不關(guān)心,只關(guān)心視覺的。...
可以參照基坐標對這些點示教。如果必須移動基坐標,例如由于工作面被移動,這些點也隨之移動,但不必重新進行示教。 可以保存多少 BASE 坐標系取決于 WorkVisual 中的配置。默認:32 個 BASE坐標系。變量:BASE_DATA[1 … 32]。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1




